【案例标题】
腿足式机器人教育生态构建 —— 齐鲁工业大学智能装备创新人才培养实践
【项目背景】
齐鲁工业大学机械工程学院为响应国家 "智能制造 2025" 战略,联合道非科技打造腿足式机器人专项实验室。针对轻工行业需求,重点突破机器人动态平衡控制、复杂环境适应等技术瓶颈,培养具备工程实践能力的创新型人才。
【解决方案】
构建 "三维立体化" 教育平台:
硬件系统部署
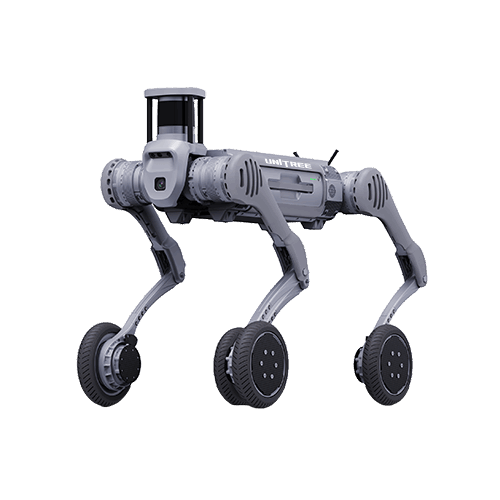
机器人集群:5 台 NAO 教育版(V6.0)+1 台 Unitree机器狗
智能实训云平台:支持多机器人远程控制、代码托管、实时学情分析
复合训练场:
▸ 动态障碍区(含可升降台阶、移动障碍物)
▸ 足球场地区(模拟足球场景)
课程体系开发
基础层:
▶ 机器人运动学与步态规划(Python+MATLAB)
▶ ROS 系统开发与多传感器融合
进阶层:
▶ 动态平衡控制算法(零力矩点 ZMP 优化)
▶ 复杂地形适应策略(沙地 / 草地 / 斜坡)
竞赛层:
▶ 腿足机器人专项训练(72 课时)
▸ 高速奔跑稳定性优化
▸ 多机器人协同搬运算法
▸ 轻工场景应急响应模拟
竞赛培育体系
阶梯式赛事参与:
▶ 校赛(季度赛)→ 省赛(山东省大学生机器人竞赛)→ 国赛(全国大学生机器人竞赛)
开发竞赛仿真系统(支持 100 + 任务场景模拟)
建立 "导师 + 企业工程师 + 学员" 联合辅导机制