【案例标题】
智能农机装备革新 —— 河南农业大学四足机器人农田检测系统实践
【项目背景】
河南农业大学智慧农业实验室为响应国家 "智慧农业" 战略,联合道非科技研发 "四足机器人 + 机械臂" 协同作业系统。针对传统农田检测效率低、地形适应性差等痛点,重点突破多模态环境感知、精准操作控制等技术,推动农业无人化作业升级。
【解决方案】
构建 "空地协同" 智能农业系统:
硬件系统部署
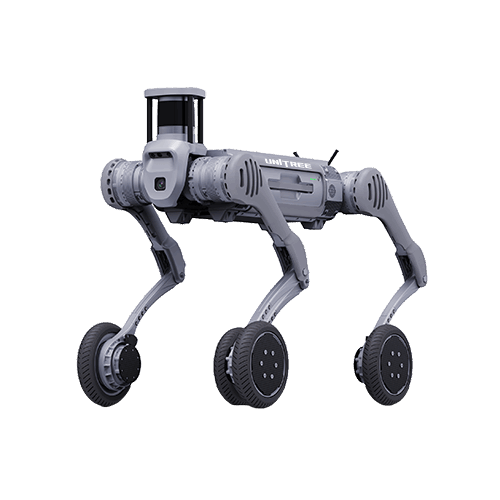
小型四足机器人
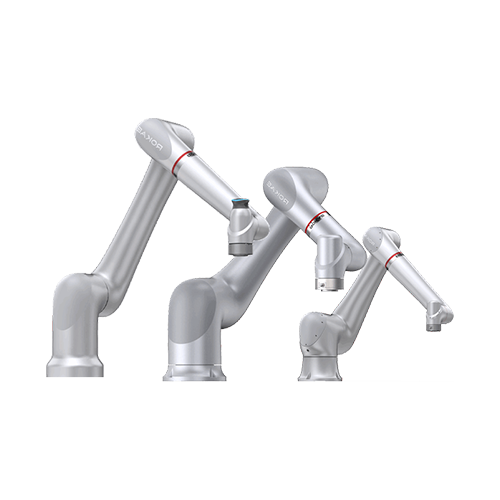
机械臂系统:
▶ 轻量型六自由度机械臂(重复定位精度 ±0.05mm)
▶ 配备农业作业工具(播种器 / 采样夹 / 喷洒头)
智能控制中心:
▶ 多机器人协同调度平台(支持 5G 远程控制)
▶ 农田数字孪生系统(实时映射作物生长状态)
核心技术模块
环境感知:
▶ 多光谱图像识别(病虫害检测准确率 95%)
▶ UWB 超宽带定位(厘米级导航精度)
精准作业:
▶ 机械臂动态路径规划(避障响应时间≤80ms)
▶ 变量喷洒控制算法(农药使用量减少 40%)
自主决策:
▶ 强化学习模型(适应不同地形作业策略)
▶ 边缘计算节点(本地化数据处理延迟
应用场景创新
农田检测:
▶ 作物健康状态评估(覆盖 1000 亩试验田)
▶ 土壤墒情实时监测(深度达 30cm)
精准作业:
▶ 稀疏地块补种(效率提升 6 倍)
▶ 病虫害区域靶向施药
应急响应:
▶ 倒伏作物扶正(成功率 92%)
▶ 暴雨后农田排水监测